
FYP 2 presentation day
this week is my presentation day. below is the presentation video.
FYP 2 presentation day
this week is my presentation day. below is the presentation video.
Project Preparation
in this week, i am doing my preparation for my demonstration day. the demonstration is required to record the demonstration of my project. Below is the demonstration video of my project.
Submit full report to SV
On week 15, I am submitting my thesis to my supervisor for Turnitin check. the percentage of my plagiarism is below 30%. i am excited that i almost finish my final year with a very helpful supervisor.
Now I can focus and make preparation for my presentation day.
Submit Draft technical report
In week 14, I am submitting my technical report draft for my supervisor to comment my report progress. The technical report is a part of assessment for FYP2 subject. The technical report pages should not exceed 5 pages. I manage to complete my report on time and ready to submit to my course coordinator.
TESTING PROTOTYPE
in this week, i am testing the project prototype for fully function. I am satisfied with my works because all the objective is achieve. The hardware development is focused on the functionality and operation of the project. A technique is discussed which is to make an automatic whiteboard cleaner by using the ultrasonic and color sensor, it will move around the whiteboard with high speed of motor and when it detects dirt it will go slow and move forward and backward twice before start moving around again. This automatic whiteboard cleaner are using battery as its sources to move around and a switch to start and stop the motor.
Also, since the manual duster can cause various types of illness, an automatic whiteboard cleaner is an effective way to avoid and reduce these type of diseases because it can move around by itself by after the user press he switch button
TROUBLESHOOT PROBLEM
In this week, when i want to test again the project prototype, the motor does not moving. I run troubleshoot for all components but all the components is functional well. I decide to change the battery and the motor start moving but slowly.
I make decision to do more research about the components and focus more at the motor driver. What i get from the research is, the motor driver need more than 10V supply to run 2 DC motor. I try to use two pieces of 9V battery at my prototype and the motor started to move faster. This week i manage to troubleshoot the problem why my motor driver did not run at high speed, it is because the motor driver did not get enough supply.
Troubleshoot for ultrasonic sensor
In this week, I am deciding to make improvement for my prototype. For ultrasonic sensor i am deciding to make it sense obstacle at 18cm far. This value is a good value because when the sensor detect the obstacle in front of it, the controller can send data to motor driver to decide where to move next. so, the 18cm is a good distance to stop and avoid any collision of the prototype and the obstacle in front of it.
if the sensor detect more than 18cm than it is means the obstacle is far with the prototype.
SUBMIT DRAFT
In week 10, I am submitting my draft report for Chapter 5 to my supervisor for him to check my progress. In this chapter the discussion of the finding will be discussed in this chapter. As we know, cleaning the whiteboard sometimes can take a lot of teaching time. In addition, cleaning the whiteboard manually will also require a lot of human energy more over if the size of the whiteboard are bigger it also take both of the time and the human energy at the same time.
In this chapter I need to provide few recommendation for my project and do comclusion from what i get by doing this project.
SET THRESHOLD
during this week, i am doing my research how to set threshold for black marker pen colour. In order to make the colour sensor work for the automatic whiteboard cleaner, the threshold for each colour must be set. To set the threshold, each colour must be tested by using TCS3200.
To complete this automatic whiteboard cleaner project, the sensor are going to detect the black colour since the black marker pen are commonly used by the teachers. To detect the black colour, the sensor need to recognize the black colour first by place the sensor at black surface. The sensor are place for a few second on the black surface to determine the threshold.


Submitting Draft
In week 8, i am completing my Chapter 4 thesis draft to my supervisor for him to check so that i can do a correction if I got mistake in my report writing. In this chapter, there are several aspects that have been considered in the making of the automatic whiteboard cleaner. The Ultrasonic Sensor from our prototype detect the obstacle in front of it and the Colour Sensor is to detect the ink residue on the whiteboard and send the input to the microcontroller (Arduino Nano) then the data are sending the signal to the motor driver. The expected result of this project are in this chapter.
TROUBLESHOOT MOTOR DRIVER
In week 17, the motor driver at my prototype did not turn on. i have check the connection on the stripboard and all the connection are okay. I run a few test at all the components and turn out the motor driver are actually broken.
i have decided to change the motor driver to a new motor driver and the new motor driver are turn on and can run the prototype.

Experimental Prototype
In week 6, after I completing my hardware prototype I am doing my testing for my prototype. The prototype on the whiteboard with the size of the whiteboard is 20inches long and 20inches width. The prototype of this whiteboard cleaner are being tested on this whiteboard. 3 Figure below shows the prototype that being tested on this whiteboard.



Hardware Development
In week 5, I am developing the hardware already. The project are designed to make is friendly to the user and make it portable so that the teacher can bring this automatic whiteboard cleaner from class to another class. The design of this automatic whiteboard cleaner are the combination of Arduino Nano, ultrasonic sensor, colour sensor, motor driver and DC motor to make the whiteboard cleaner easy to move around the whiteboard.
The prototype are attached to each other on the duster itself. This prototype are using battery as the power supply to move this automatic whiteboard cleaner and also to make it portable and wireless. The toggle switch are connected in series with the battery because it can be a semiconductor to the circuit. The switch are used to turn on and turn off the prototype.
Software Developement
In week 4, i am doing my coding for my colour sensor. Colour sensor are used to detect the remains stain at the whiteboard after the cleaning. The colour sensor are controlled by the arduino nano and give feedback to the motor driver to control the movement at the whiteboard.


From Figure above , pin S0,S1,S2,S3 are defined as the output of the colour sensor and sensorOut is the input to detect any colour. S0 and S1 act as the output frequency scaling selection inputs and S2 and S3 as the selection input for photodiode type. The frequency scaling of the colour sensor are also set to 20%. This frequency-scaling feature optimizes the sensor's performance for different frequency counters or microcontrollers.

Figure show the program to set the frequency scaling to detect black colour. The reason why to detect the black colour is because black colour marker pen are commonly used at the whiteboard. When the sensor detect the black colour, the reading of the black colour will be display at the serial monitor. The threshold for the black colour are determined from the reading at the serial monitor.

The threshold for black colour is around the value 80 and 90. The relationship between colour sensor and motor is, if the reading is between 80 and 90 that is mean the colour sensor detect the dirt left on the whiteboard. The colour sensor will send input to the motor so that the motor will move forward and backward two times to make sure the whiteboard are cleaned.
Software Development
In week 3, I am doing my coding for my motor driver. motor driver are use to control the dc motor movement at the prototype. To move this automatic whiteboard cleaner, motor driver L298N are use with the DC motor. The motor driver are connected with the Arduino Nano in this project.
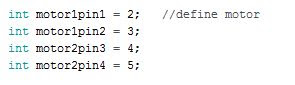
Figure show the motor driver are connected to the arduino board. The first two line is to define port at arduino board for motor 1 and the other two line is to define pins for motor 2.

From figure above, the motor was define as the output because for this automatic whiteboard cleaner the motor was declared as the output so that it can easily move around the whiteboard.
Software development
On week 2, I am doing my coding for ultrasonic sensor. This automatic whiteboard cleaner are using ultrasonic sensor as the obstacle avoiding system on the whiteboard. The whiteboard will be mount with an obstacle at the border of the whiteboard that act as the obstacle for the system.

The ‘int’ in this program are used to declare multiple variables at once in c language. In this project, it is used to declare the trigger pin and the echo pin of the ultrasonic sensor. The trigger pin at the ultrasonic sensor act as input and echo pin are use as the output pin. The program used ‘int’ because it takes less space than the others.

‘long’ are used in this program because it can store up to 64-bit signed integer. The long in this program are used to calculate the duration and distance for the ultrasonic sensor. The distance are calculate by using this formula; Distance = Speed x Time.
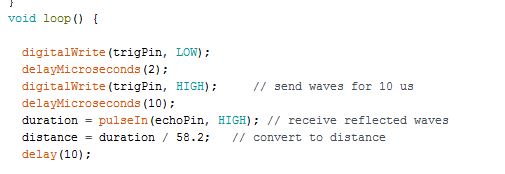
Based on figure above, it shown the loop program for the ultrasonic sensor. Loop program are important to make sure it keep moving until the user stop the program by the switch. When the ultrasonic sensor did not detect any obstacle in front of it the input will remain at the low state. When the sensor detect the obstacle the input will be high and it will send the input to the controller and the output will also be high state. The distance will be calculate before the output become high.


Software designation in Arduino for each components
Before starting doing the coding, I need to explore the Arduino IDE software because i never use the software before. I learn how to include components library into the software and realize that it is easy to use the software.
The language that will be use in the software is C-language. It make me learn more faster since i have the knowledge about the language that will be use.
During week 1, I am researching about how to write code for each of my components. the components is ultrasonic sensor, colour sensor and motor driver. I need to calibrate each of the components and make sure the components are in good condition.
copyright © . all rights reserved. designed by Color and Code
grid layout coding by helpblogger.com